日拱一卒王小楼
現在、コンテンツはありません
日拱一卒王小楼
私の混乱:老黄はGPUが未来だと言い、苏妈はCPUが未来だと言い、結果的に両方とも新高値をつけた、では結局誰が未来なのか?
原文表示

- 報酬
- いいね
- コメント
- リポスト
- 共有
昨晚在同学家喝酒,早晨起来看下 Whoop 的数据,recovery 直接红色了。
AI 分析了一下:睡8小时 ≠ 休息8小时。酒精让你的睡眠变成了「低质量睡眠」——躺着但没真正恢复。
身体没在休息 — 晚上肝脏在全力代谢酒精,皮质醇(压力激素)升高,相当于你身体边睡边加班。
AI 分析了一下:睡8小时 ≠ 休息8小时。酒精让你的睡眠变成了「低质量睡眠」——躺着但没真正恢复。
身体没在休息 — 晚上肝脏在全力代谢酒精,皮质醇(压力激素)升高,相当于你身体边睡边加班。
- 報酬
- いいね
- コメント
- リポスト
- 共有
熊市の不安?まず残酷な事実を受け入れよう
あなたが見る取引の神たちの多くは、もともとお金を持っている。10万ドルで2%の波動を取り、2000ドル稼ぐ。あなたは「また2000ドル稼いだ」とだけ見ているが、彼らの元本や試行錯誤のコストは見ていない。
普通の人はどうすればいい?チャンスはあるが、非常に難しい。
なぜなら、あなたは負けられないからだ。ほかの人は3、5年かけてゆっくり学べるが、あなたはそうではない。だから、次のことをしなければならない:
感情を積極的にコントロールし、FOMOに縛られない
積極的に損切りし、損をしないことを優先する
利益と損失の比率が最大の場所で少額で大きく勝つ
スタートラインが違う、他人と比べるだけで不安になる。平凡さを受け入れれば、一つ一つの進歩の価値がわかる。
目標は安定した利益を出すことであり、暴利を狙うことではない。多く稼ぐのは運だが、地に足をつけることが本当の実力だ。自分をしっかり持ち、他人と比べないこと。
原文表示あなたが見る取引の神たちの多くは、もともとお金を持っている。10万ドルで2%の波動を取り、2000ドル稼ぐ。あなたは「また2000ドル稼いだ」とだけ見ているが、彼らの元本や試行錯誤のコストは見ていない。
普通の人はどうすればいい?チャンスはあるが、非常に難しい。
なぜなら、あなたは負けられないからだ。ほかの人は3、5年かけてゆっくり学べるが、あなたはそうではない。だから、次のことをしなければならない:
感情を積極的にコントロールし、FOMOに縛られない
積極的に損切りし、損をしないことを優先する
利益と損失の比率が最大の場所で少額で大きく勝つ
スタートラインが違う、他人と比べるだけで不安になる。平凡さを受け入れれば、一つ一つの進歩の価値がわかる。
目標は安定した利益を出すことであり、暴利を狙うことではない。多く稼ぐのは運だが、地に足をつけることが本当の実力だ。自分をしっかり持ち、他人と比べないこと。
- 報酬
- いいね
- コメント
- リポスト
- 共有
現代の若者の幻想:
1. 誰もがセルフメディア;
2. 大手企業を辞めた後、生活はまるで荒野;
実際には:
1. 生活の負け犬は、インターネット上でもやはり負け犬;
2. 大手企業の虚飾を剥がすと、やはり私は何も成し遂げていなかった;
原文表示1. 誰もがセルフメディア;
2. 大手企業を辞めた後、生活はまるで荒野;
実際には:
1. 生活の負け犬は、インターネット上でもやはり負け犬;
2. 大手企業の虚飾を剥がすと、やはり私は何も成し遂げていなかった;
- 報酬
- いいね
- コメント
- リポスト
- 共有
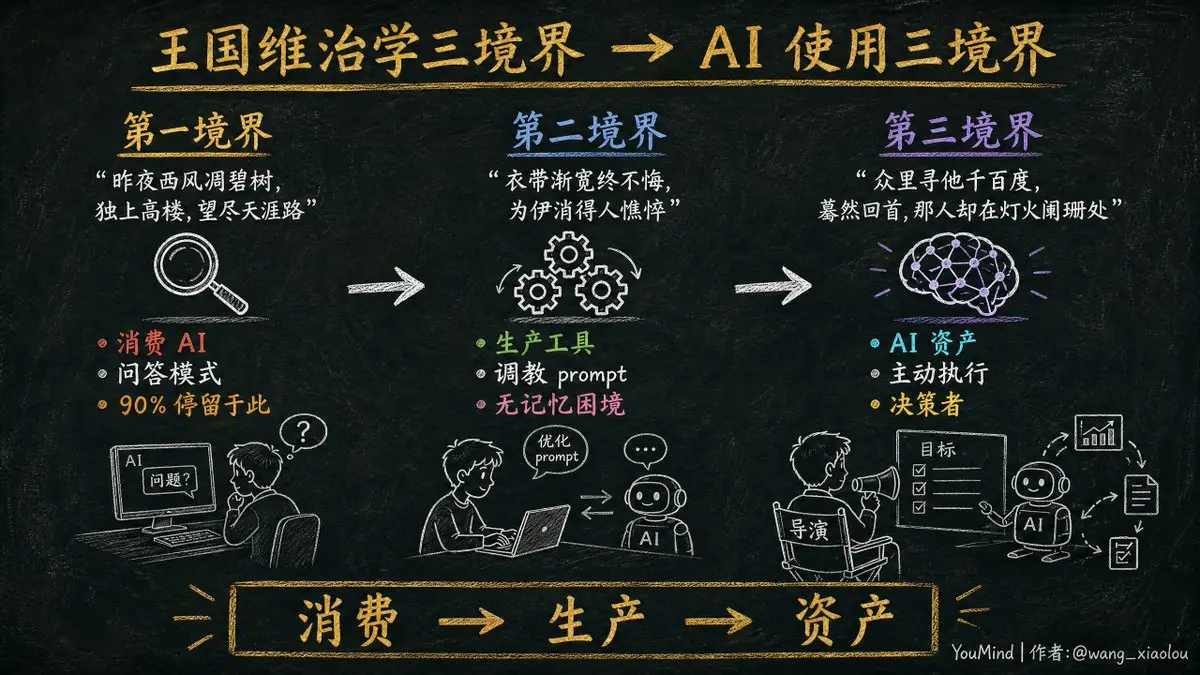
AIの三つの境地。
王国維は学問の三境界を説いたが、AIにも同じことが言える。
第一境界:昨夜西風凋碧樹,獨上高樓,望盡天涯路
あなたはAIを使い始めたばかり。
質問を投げると、答えが返ってくる。
百度より速く、Googleより正確で、気持ちいい。
しかし本質的には、あなたはまだ検索をしているだけだ。
質問して終わり、何も蓄積しない。
毎回対話を開くたびに、初めて会うようなものだ。
あなたはAIを消費している。
宅配を頼むのと変わらない—食べ終わったら終わりだ。
この段階では、90%の人がここで止まる。
第二境界:衣帯漸寬終不悔,为伊憔悴人憔悴
あなたは何かがおかしいと感じ始める。
AIはただの質問回答ツールではなく、
あなたの仕事を手伝う同僚になり得ることに気づく。
データを与え、プロンプトを調整し、ワークフローを構築し始める。
初稿を書かせたり、素材を整理させたり、レポートを分析させたり。
調教に時間をかけるほど、AIはあなたにサービスを提供する。
しかし、致命的な問題がある:
それは記憶を持たないことだ。
完璧なワークフローを三時間かけて調整しても、
次に対話を開けば、すべてリセットされる。
あなたは再び自分が誰で、何を望むかを教え直さなければならない。
まるで記憶喪失の同僚のようだ。
能力は高いが、記憶はゼロ。
あなたは生産しているが、効率には天井がある。
第三境界:众里寻
原文表示王国維は学問の三境界を説いたが、AIにも同じことが言える。
第一境界:昨夜西風凋碧樹,獨上高樓,望盡天涯路
あなたはAIを使い始めたばかり。
質問を投げると、答えが返ってくる。
百度より速く、Googleより正確で、気持ちいい。
しかし本質的には、あなたはまだ検索をしているだけだ。
質問して終わり、何も蓄積しない。
毎回対話を開くたびに、初めて会うようなものだ。
あなたはAIを消費している。
宅配を頼むのと変わらない—食べ終わったら終わりだ。
この段階では、90%の人がここで止まる。
第二境界:衣帯漸寬終不悔,为伊憔悴人憔悴
あなたは何かがおかしいと感じ始める。
AIはただの質問回答ツールではなく、
あなたの仕事を手伝う同僚になり得ることに気づく。
データを与え、プロンプトを調整し、ワークフローを構築し始める。
初稿を書かせたり、素材を整理させたり、レポートを分析させたり。
調教に時間をかけるほど、AIはあなたにサービスを提供する。
しかし、致命的な問題がある:
それは記憶を持たないことだ。
完璧なワークフローを三時間かけて調整しても、
次に対話を開けば、すべてリセットされる。
あなたは再び自分が誰で、何を望むかを教え直さなければならない。
まるで記憶喪失の同僚のようだ。
能力は高いが、記憶はゼロ。
あなたは生産しているが、効率には天井がある。
第三境界:众里寻
- 報酬
- いいね
- コメント
- リポスト
- 共有
残酷なデータファネルを見た:
10% の人が何が重要かを知っているが、そのうちの 10% だけが行動する。だから残りは 1%。
そして、その 1% の中で、日々続けられるのは 10% だけ。
最終的に、世界で本当に成功している人は 1‰ だけ。
この割合は古今東西変わらず、未来も変わらない。
だから、「大多数の努力レベルは低すぎて、天賦の才と競う余地もない」という言葉は正しい。
知ることとやることの間には 99% の人がいる。やることと続けることの間には 90% の人がいる。
共に励もう。
原文表示10% の人が何が重要かを知っているが、そのうちの 10% だけが行動する。だから残りは 1%。
そして、その 1% の中で、日々続けられるのは 10% だけ。
最終的に、世界で本当に成功している人は 1‰ だけ。
この割合は古今東西変わらず、未来も変わらない。
だから、「大多数の努力レベルは低すぎて、天賦の才と競う余地もない」という言葉は正しい。
知ることとやることの間には 99% の人がいる。やることと続けることの間には 90% の人がいる。
共に励もう。
- 報酬
- いいね
- コメント
- リポスト
- 共有
試験思考とは何か?
- 基準は他人が決める
- 正誤は他人が判定する
- 合格すれば自分はできると思い、落ちれば自分はダメだと思う
もう「正解」を待つのはやめよう。
この世界に正解は存在しない。
ただ、自分の問題に挑戦する勇気があるかどうかだ。
原文表示- 基準は他人が決める
- 正誤は他人が判定する
- 合格すれば自分はできると思い、落ちれば自分はダメだと思う
もう「正解」を待つのはやめよう。
この世界に正解は存在しない。
ただ、自分の問題に挑戦する勇気があるかどうかだ。
- 報酬
- いいね
- コメント
- リポスト
- 共有
真正の達人は決して運命を嘆かない
問題に直面したとき、普通の人の最初の反応は:「運が悪い」「社会のせいだ」。
しかし、達人の脳回路は全く異なる——彼らはすぐに自問する:「何をすれば解決できるか?」
これがいわゆる high agency mindset:自分を被害者と見なさず、自分を問題の解決者と考えること。
環境がチャンスを与えない?関係ない、人は生きている。飛び出して、新しい可能性を探す。
他人を責めず、足を止めず、問題そのものの解決に集中する。
この思考パターンこそ、人と人の差を広げる鍵だ。なぜなら、不平を言っても何も変わらないから、行動こそが変える力だから。
原文表示問題に直面したとき、普通の人の最初の反応は:「運が悪い」「社会のせいだ」。
しかし、達人の脳回路は全く異なる——彼らはすぐに自問する:「何をすれば解決できるか?」
これがいわゆる high agency mindset:自分を被害者と見なさず、自分を問題の解決者と考えること。
環境がチャンスを与えない?関係ない、人は生きている。飛び出して、新しい可能性を探す。
他人を責めず、足を止めず、問題そのものの解決に集中する。
この思考パターンこそ、人と人の差を広げる鍵だ。なぜなら、不平を言っても何も変わらないから、行動こそが変える力だから。
- 報酬
- いいね
- コメント
- リポスト
- 共有
五つの鉄則:
1⃣ 最初の資金の核心任務は倍増させることではなく、維持することだ。若者の最大の幻想は「まだ上がる」ことだ。
2⃣ レバレッジを使わない。理解していないわけではないが、レバレッジをかけた瞬間にあなたは投資ではなくギャンブルをしている。
3⃣ 元本こそ最も希少な資産であり、チャンスではない。市場には常に次のチャンスがあるが、ロスカットすればもう終わりだ。
4⃣ 最も良いストーリーは最も多くの人を殺す。エアコイン、NFT、DeFi、ビットコインエコシステム——物語は常に変わり続け、犠牲になるのはいつも同じ人たちだ。
5⃣ 損益は源を同じくする。あなたを富ませる判断も、最終的にはあなたを殺すことになる。
原文表示1⃣ 最初の資金の核心任務は倍増させることではなく、維持することだ。若者の最大の幻想は「まだ上がる」ことだ。
2⃣ レバレッジを使わない。理解していないわけではないが、レバレッジをかけた瞬間にあなたは投資ではなくギャンブルをしている。
3⃣ 元本こそ最も希少な資産であり、チャンスではない。市場には常に次のチャンスがあるが、ロスカットすればもう終わりだ。
4⃣ 最も良いストーリーは最も多くの人を殺す。エアコイン、NFT、DeFi、ビットコインエコシステム——物語は常に変わり続け、犠牲になるのはいつも同じ人たちだ。
5⃣ 損益は源を同じくする。あなたを富ませる判断も、最終的にはあなたを殺すことになる。
- 報酬
- いいね
- コメント
- リポスト
- 共有
今、プロジェクト側の逃走速度もあまりに速すぎる、私はまだ @printr が何をしているのか理解していないのに、もう逃げるのか?
原文表示- 報酬
- いいね
- コメント
- リポスト
- 共有
本当の善意は宗教の包装を必要としない。
雨の夜にもう一品買って、屋台の主人を早く帰らせる;ゴミの中の刃物をテープで巻いて、ゴミ拾いをする人を守る——これらの小さな行動の価値は、何か見返りを得られることにあるのではなく、この世界を少しでも良くしようと選んだことにある。
優しさは本能であり、投資ではない。
原文表示雨の夜にもう一品買って、屋台の主人を早く帰らせる;ゴミの中の刃物をテープで巻いて、ゴミ拾いをする人を守る——これらの小さな行動の価値は、何か見返りを得られることにあるのではなく、この世界を少しでも良くしようと選んだことにある。
優しさは本能であり、投資ではない。
- 報酬
- いいね
- コメント
- リポスト
- 共有
いつも誰かが言う、AIが来た、文系の学生はどうこうと、ついさっき知ったばかりだが、皆がよく知っている郭宇もまた文系の学生だ。
原文表示- 報酬
- いいね
- コメント
- リポスト
- 共有
除了暗号化とマイクロソフト、外はすべて強気市場。
原文表示
- 報酬
- いいね
- 1
- リポスト
- 共有
GateUser-da7ec8a8:
ブル・ラン 🐂ある日、子供があなたに尋ねました:「お父さん、仮想通貨の世界って何?」
あなたは考え込み、「それは人々が希望を買うためにお金を使う場所だけど、ほとんどの場合、手に入れるのは教訓だけだ」と答えました。
原文表示あなたは考え込み、「それは人々が希望を買うためにお金を使う場所だけど、ほとんどの場合、手に入れるのは教訓だけだ」と答えました。
- 報酬
- いいね
- コメント
- リポスト
- 共有
毛をむしる党、立ち上がれ、次の戦場は:香港株の新規公開株。
原文表示- 報酬
- いいね
- コメント
- リポスト
- 共有
???これも可能ですか?
国家発展改革委員会:法に従い規則に基づき外資によるManusプロジェクトの買収に対して投資禁止の決定を下し、当事者にその買収取引を撤回するよう求める
原文表示国家発展改革委員会:法に従い規則に基づき外資によるManusプロジェクトの買収に対して投資禁止の決定を下し、当事者にその買収取引を撤回するよう求める

- 報酬
- いいね
- コメント
- リポスト
- 共有
プロジェクトチームが仕事をしている😄
長い間この言葉を聞いていなかったので、もう忘れかけていた
原文表示長い間この言葉を聞いていなかったので、もう忘れかけていた
- 報酬
- いいね
- コメント
- リポスト
- 共有
借金の鉄則
借金する前に自分に一言問いかける:「このお金が永遠に返ってこなくても受け入れられるか?」
受け入れられないなら、借りるな。
「投資が必要」「ビジネスの資金繰り」「住宅購入の差額」——これらはすべてあなたが私的な関係で解決すべき問題ではない。もし彼の財務の穴を友人から借りたお金で埋める必要があるなら、それはあなたに伝えられた以上に深刻な問題を示している。
借りることに決めた?三つのことを行う:借用証を書き、銀行振込をし、心理的な期待値をゼロにする。
一度返さなかったら、絶対に二度目は借りない。この判断の正確率はほぼ100%。
一言学べ:「すみません、私には一つの原則があります。友人にお金を貸さないことです。お金のことで関係を壊したくないからです。」
この言葉を言う数秒間の不快感は、何十万も返ってこず、友人とも関係が壊れる結末に比べればはるかにましだ。
この時代、最も高価なのはお金ではなく、境界感である。
原文表示借金する前に自分に一言問いかける:「このお金が永遠に返ってこなくても受け入れられるか?」
受け入れられないなら、借りるな。
「投資が必要」「ビジネスの資金繰り」「住宅購入の差額」——これらはすべてあなたが私的な関係で解決すべき問題ではない。もし彼の財務の穴を友人から借りたお金で埋める必要があるなら、それはあなたに伝えられた以上に深刻な問題を示している。
借りることに決めた?三つのことを行う:借用証を書き、銀行振込をし、心理的な期待値をゼロにする。
一度返さなかったら、絶対に二度目は借りない。この判断の正確率はほぼ100%。
一言学べ:「すみません、私には一つの原則があります。友人にお金を貸さないことです。お金のことで関係を壊したくないからです。」
この言葉を言う数秒間の不快感は、何十万も返ってこず、友人とも関係が壊れる結末に比べればはるかにましだ。
この時代、最も高価なのはお金ではなく、境界感である。
- 報酬
- いいね
- コメント
- リポスト
- 共有
Kelp DAOがハッキングされ、Arbitrumは直接7100万ドル相当のETHを凍結した。
現在、Aave、Kelp、LayerZeroの3社が共同でDAOに提案を提出し、凍結解除を求めている。
どれくらいかかる?49日だ。
一人がハッキングされ、一つのチェーンがあなたの資金を凍結した。聞こえは良いが、
自分の資金を取り戻すには、まず提案を書き、投票を集め、49日待ち、さらにコミュニティの反対に直面しなければならない。
長年分散型を叫び続けてきたが、結局は三社が共同で申請し、投票結果を待つだけだ。
これはDeFiではない。これはブロックチェーンの皮をかぶった銀行だ——ただし銀行の承認は3日だが、DAOの承認には49日かかる。
あなたの資産はチェーン上にあるが、管理権は他人の投票箱の中にある。
覚えておけ:スマートコントラクトはルールを実行してくれるが、そのルールは誰が書いたのか?
原文表示現在、Aave、Kelp、LayerZeroの3社が共同でDAOに提案を提出し、凍結解除を求めている。
どれくらいかかる?49日だ。
一人がハッキングされ、一つのチェーンがあなたの資金を凍結した。聞こえは良いが、
自分の資金を取り戻すには、まず提案を書き、投票を集め、49日待ち、さらにコミュニティの反対に直面しなければならない。
長年分散型を叫び続けてきたが、結局は三社が共同で申請し、投票結果を待つだけだ。
これはDeFiではない。これはブロックチェーンの皮をかぶった銀行だ——ただし銀行の承認は3日だが、DAOの承認には49日かかる。
あなたの資産はチェーン上にあるが、管理権は他人の投票箱の中にある。
覚えておけ:スマートコントラクトはルールを実行してくれるが、そのルールは誰が書いたのか?
- 報酬
- いいね
- コメント
- リポスト
- 共有
人気の話題
もっと見る512.59K 人気度
106.3M 人気度
43.47K 人気度
3.27M 人気度
1.42M 人気度
ピン